自動運転の実現に過剰なまでのセンサーが必要な理由
テスラのオートパイロット機能での死亡事故は「センサー不足」が批判された。なぜ自律自動車には過剰ともいえるセンサーが搭載されているのだろうか。 by Jamie Condliffe2017.07.24
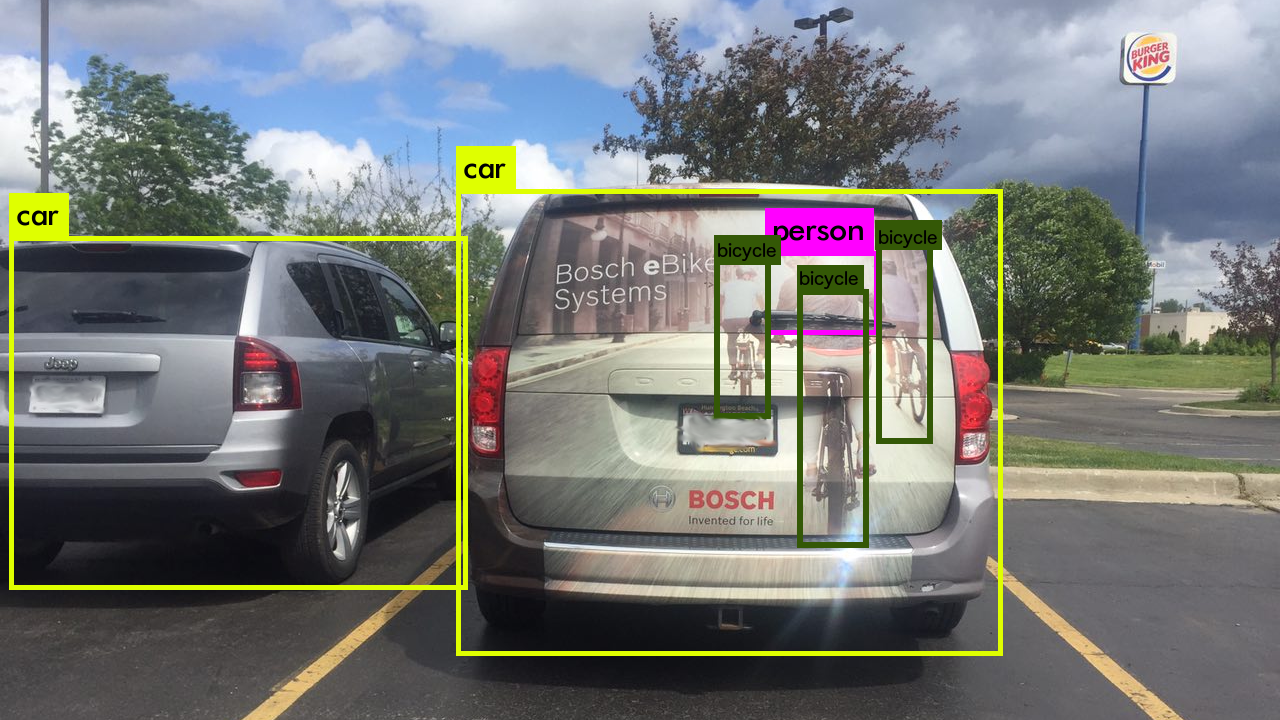
自律自動車といえば、カメラ、超音波センサー、レーダー、ライダー(LIDER:レーザーによる画像検出・測距)など、多種多様なセンサーを搭載していると誇らしげに喧伝する。しかし、どうしてこんなにたくさんのセンサーが必要なのだろうかと不思議に思ったことはないだろうか。その理由は上の画像を見れば一目瞭然だ。
画像で示されているのは、自律自動車産業でいわゆる「エッジ・ケース」として知られている例、つまり自律制御のソフトウェアが人の認識とは異なる判断をしたために、車両が予測不能な動きをする恐れがある状況だ。通常のカメラで撮影した画像データで、画像認識ソフトはワゴン車の背面の自転車に乗っている人の写真を本物の人間と誤認識してしまったのだ。
自律自動車に特有の盲点は、ソフトウェア・シミュレータの開発を手がける企業コグナータ(Cognata)の研究者によって明らかになった。ソフトウェア・シミュレーターとは簡単に言えば、非常に精度が高い、高度なプログラムができるコンピューター・ゲームで、自動車メーカーはこれを使って自律運転のアルゴリズムをテストできる。シュミレーターによって、車両が事故を起こす危険が無い方法を見つけるまで、このようなエッジ・ケースの対処に取り組むことができるのだ。
自律自動車の多くは、さまざまなタイプの感知機能を併用して、紛らわしい画像の判断という課題に対処している。「ライダーはガラスを感知できません。そして、レーダーが感知するのは主に金属です。カメラは画像に騙されてしまうことがあります」。コグナータのダニー・アツモンCEO(最高経営責任者)は説明する。「自律運転に使われるセンサーが直面する課題は、それぞれ異なっているのです」。あるエッジ・ケースに正しく対応するためにはどのデータを使えばいいのかを、シミュレーションと実証実験の両方で徐々に解決していくことで、自律自動車はより複雑な状況に対処できるようになるかもしれない。
テスラは自社のオートパイロット・システムで使うデータは、レーダー、カメラ、超音波センサーからのデータしか使用しないという決定をして非難を浴びた。テスラの車が眩しく光る空を背にした貨物トラックを認識できず衝突し、テスラに乗っていた運転手が死亡する事故が起きたからだ。批評家たちは、ライダーは複合型センサー・システムに欠かせない要素だと主張する。ライダーはカメラとは違って薄明かりや眩しい光の中でもうまく機能するだけではなく、レーダーや超音波センサーより詳細なデータを集められるからだ。だが、アツモンCEOが指摘する通り、そのライダーですら欠点がないわけではない。たとえば、ライダーは信号機の赤と青を見分けられない。
だから、自動車メーカーにとって一番の安全策は、たくさんのセンサーを使って過剰ともいえる感知システムを構築することなのだ。少なくとも、自転車に乗った人が誤認識されてしまわないためには必要なことなのだ。
(関連記事:“Robot Cars Can Learn to Drive without Leaving the Garage,” “Self-Driving Cars’ Spinning-Laser Problem,” “テスラの死亡事故で自動運転の規制強化へ”)
- 人気の記事ランキング
-
- It’s time to address the looming crisis in entry-level work. 「コーディングを学べ」もう通用せず、AIが若者の雇用を奪い始めた
- Promotion Call for entries for Innovators Under 35 Japan 2026 「Innovators Under 35 Japan」2026年度候補者募集のお知らせ
- China has approved the world’s first invasive brain-computer chip—here’s what’s next 中国、BCIを国家戦略に 世界初の商用化で イーロン・マスクにも先行
- Anthropic’s Code with Claude showed off coding’s future—whether you like it or not 「Claudeに任せてしまおう」 たった1年で激変したソフトウェア開発
- A reality check on the AI jobs hysteria 「ホワイトカラー消滅」 まだデータに兆候なし ——ただし若者に警戒信号
| タグ | |
|---|---|
| クレジット | Image courtesy of Cognata |
- ジェイミー コンドリフ [Jamie Condliffe]米国版 ニュース・解説担当副編集長
- MIT Technology Reviewのニュース・解説担当副編集長。ロンドンを拠点に、日刊ニュースレター「ザ・ダウンロード」を米国版編集部がある米国ボストンが朝を迎える前に用意するのが仕事です。前職はニューサイエンティスト誌とGizmodoでした。オックスフォード大学で学んだ工学博士です。