見落とされてきた「耳」、音を学んだロボットはもっと賢くなる
ロボットを訓練するのにはこれまで、主に視覚データが用いられてきた。だが、タスクによっては、聴覚データも含めて訓練に使用すると成功率があがることが分かっている。 by James O'Donnell2024.07.09
- この記事の3つのポイント
-
- AI搭載ロボットの訓練に音声データが有用であることが判明
- 音声によりロボットは視界が限られた環境でもタスクを遂行できる
- さらなるデータ収集によりロボットの機能向上が期待される
最近の人工知能(AI)搭載ロボットの多くはカメラを使って周囲の状況を把握し、新しいタスクを学習している。だが、ロボットを音声で訓練することも容易になってきており、視界が限られたタスクや環境に適応させるのに役立っている。
視覚は重要だが、音声のほうが学習に役立つ日常の作業もある。コンロの上で玉ねぎがジュージューと焼ける音を聞いてフライパンの温度が適切かどうかを判断するのはその一例だ。ただ、音声を使ったロボットの訓練は、高度な管理下にあるラボ環境でのみ実施されてきたのが現状で、その手法は他の高速のロボット教育方法に比べると遅れている。
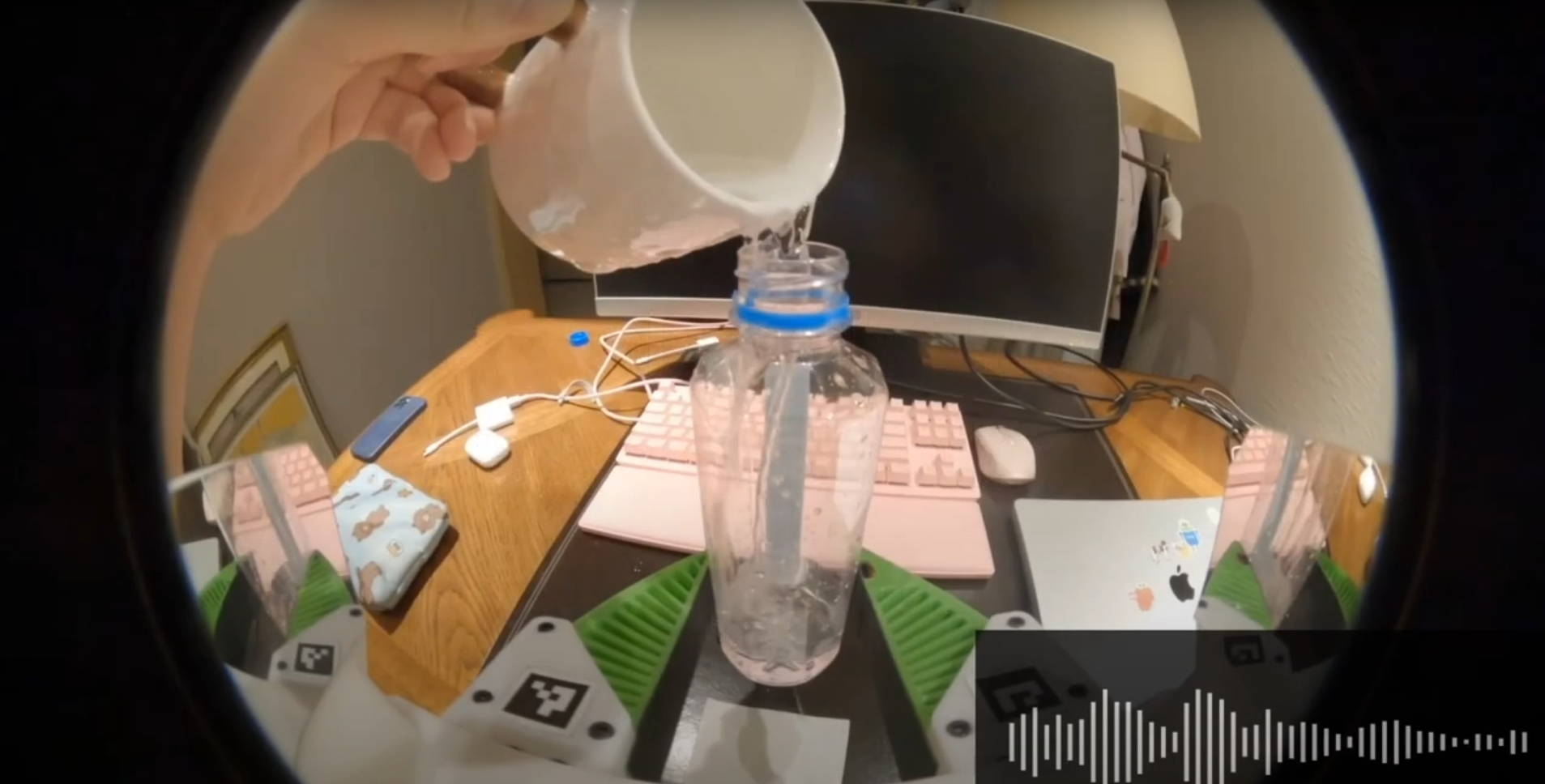
スタンフォード大学のロボット工学・エンボディドAI研究所の研究チームが、この状況を変えようとしている。研究チームはまず、音声データを収集するため、ゴープロ(GoPro)のカメラと、バックグラウンドノイズを除去するマイクが付いたグリッパーから成るシステムを構築した。人間のデモンストレーターが、グリッパーを使ってさまざまな家事を実行し、そのデータを活用してロボットアームに自力で作業を進める方法を教えた。この研究チームの新しい訓練アルゴリズムは、ロボットが音声信号から手がかりを集めて動作の能率を上げられるようにするものだ。
「これまでロボットは、音声を消した動画を使って訓練されてきました」。スタンフォード大学博士課程の学生で、この研究の主著者であるツェイ・リウは言う。「しかし、音声には非常に有用なデータがたくさんあります」。
研究チームは、ロボットが「聞く」能力を持った場合にどれだけ機能が向上するかをテストするための4つのタスクを選定した。フライパンでベーグルをひっくり返す、ホワイトボードの字を消す、2枚の面ファスナーをくっつける、カップからサイコロ …
- 人気の記事ランキング
-
- Anthropic can now track the bizarre inner workings of a large language model 大規模言語モデルは内部で 何をやっているのか? 覗いて分かった奇妙な回路
- Promotion MITTR Emerging Technology Nite #32 Plus 中国AIをテーマに、MITTR「生成AI革命4」開催のご案内
- AI companions are the final stage of digital addiction, and lawmakers are taking aim SNS超える中毒性、「AIコンパニオン」に安全対策求める声
- What is vibe coding, exactly? バイブコーディングとは何か? AIに「委ねる」プログラミング新手法
- Tariffs are bad news for batteries トランプ関税で米電池産業に大打撃、主要部品の大半は中国製