衛星を「宇宙で修理」、軌道上サービスはどう生まれたのか?
新たな宇宙ビジネスとして成長が期待される「軌道上サービス」はどのようにして生まれたのか? その背景を解説する。 by Ayano Akiyama2020.12.14
スペースシャトル計画にとって最後のフライトとなった2011年のアトランティス号の飛行ミッション「STS-135」は、2020年のスペースXによる民間宇宙船の飛行実証という宇宙開発の未来の始まりだった。STS-135では、もうひとつ宇宙開発の未来につながる実験装置がISSへと運ばれている。「ロボットによる燃料補給ミッション(Robotic Refueling Mission: RRM)」という、軌道上サービスの技術実証ミッションだ。
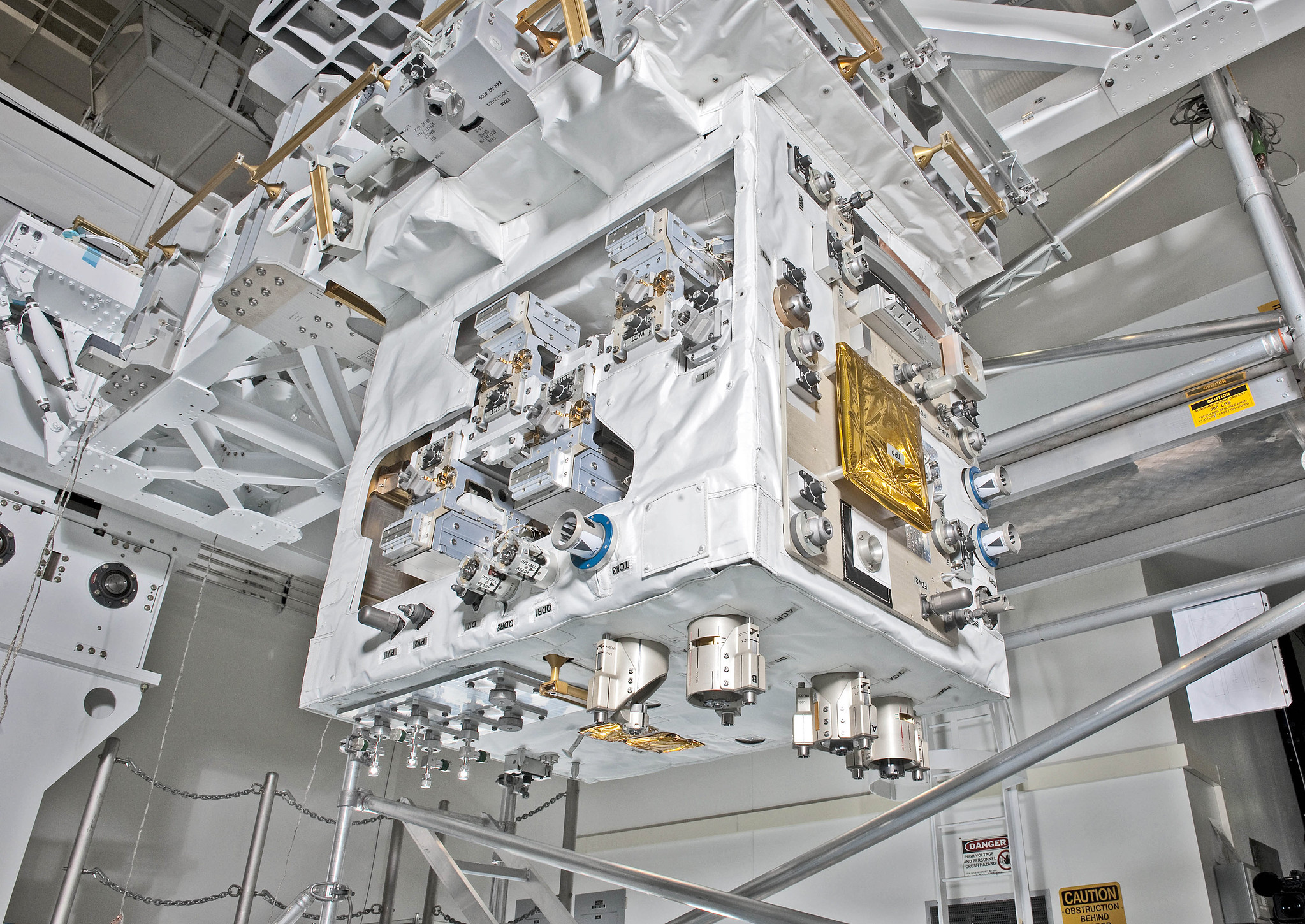
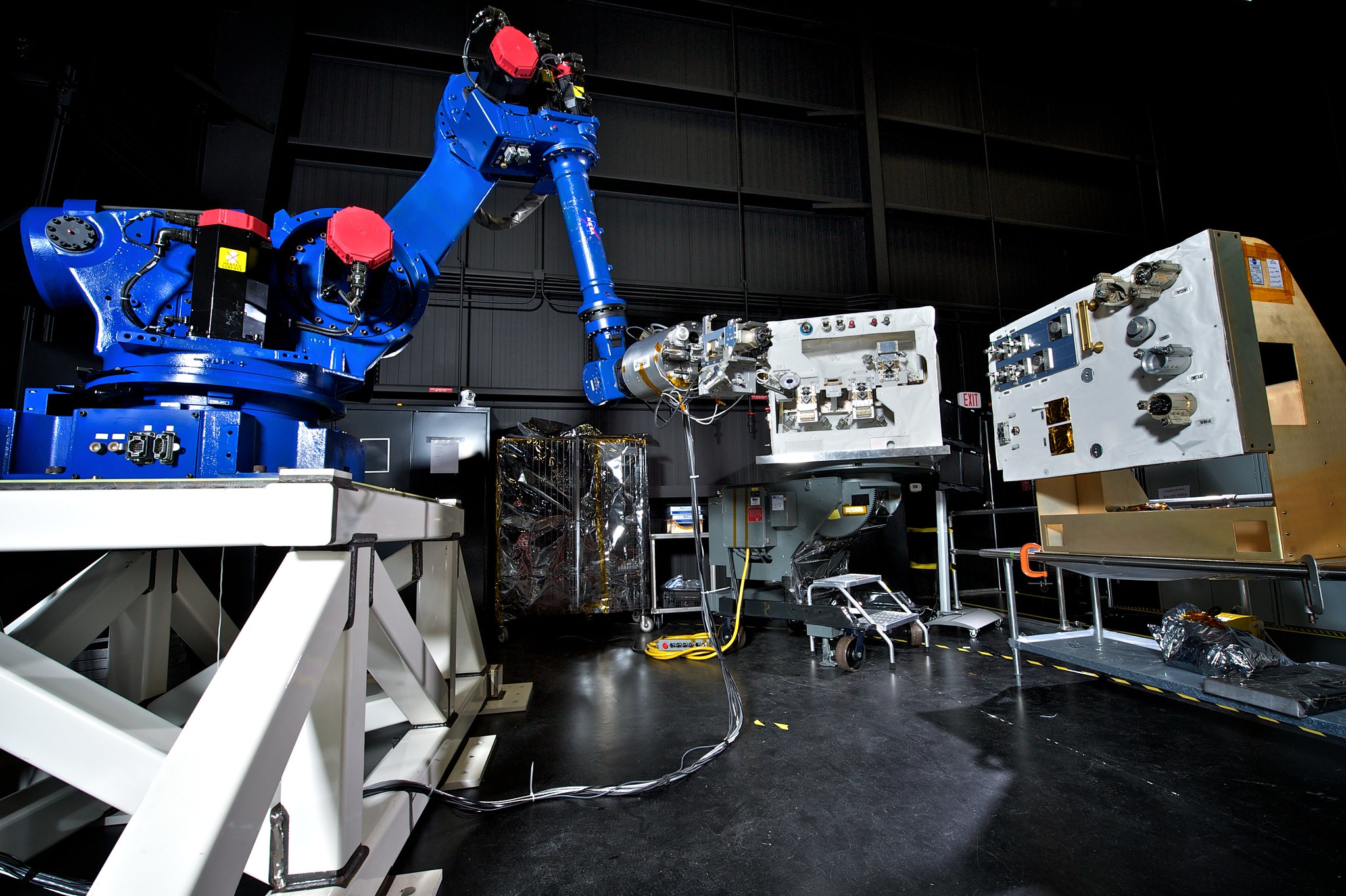
RPMは、軌道上で衛星に推進剤を補給し、寿命を延長する技術の確立を目指した。装置は国際宇宙ステーションの外側に取り付けられ、2011年から2014年まで3回の実証が実施された。カナダが開発したISSのロボットアーム「デクスター」は、PRM実験装置の外装の切断、燃料ホースの接続、燃料を模したエタノールの移送などの作業を地上からの遠隔操作でこなした。ロボット衛星による軌道上での推進剤補給を模擬したもので、軌道上での推進剤補給に対応するように設計された衛星だけではなく、未対応の既存の衛星への補給を実現することを目指している。
RRM装置を開発、操作したのはNASAのゴダード宇宙飛行センター(GSFC)。1959年に、NASAで最初の宇宙飛行センターとして設立され、世界初の気象衛星「タイロス1号」やハッブル宇宙望遠鏡(HST)を開発している。主に地球周辺で活躍する人工衛星の開発や関連する技術開発を担当するGSFCは、軌道上サービスの分野で中心的な役割を担ってきた。GSFCが2010年に発表したレポートから、軌道上サービスという技術がどのように生まれ、何を期待されているのか、振り返ってみよう。
軌道上サービスの歴史
「人工衛星に軌道上で修理、改修、物資補給を提供する」という観点での軌道上サービスの始まりは、宇宙飛行士による有人の作業だった。1973年5月に打ち上げられた軌道上実験施設「スカイラブ」で、微小隕石シールドと太陽電池パネルの展開に不具合が発生。宇宙飛行士が船外作業(EVA)を行ない、パネルの展開やシールドの交換といった作業によってようやくスカイラブは実験室として機能するようになった。NASA初の軌道上サービスは必要に迫られての修理ミッションだったといえる。
1980年代までに、NASAは「燃料補給」または「物資補給」、「修理」、「改修」、「システムアップグレード」の4項目を軌道上サービスの中核技術と位置づけて検討を開始した。軌道上サービスを受けることを前提に衛星のコネクタやポート、サービサー側が相手を把持するための器具などの共通設計を確立することを目指していた。
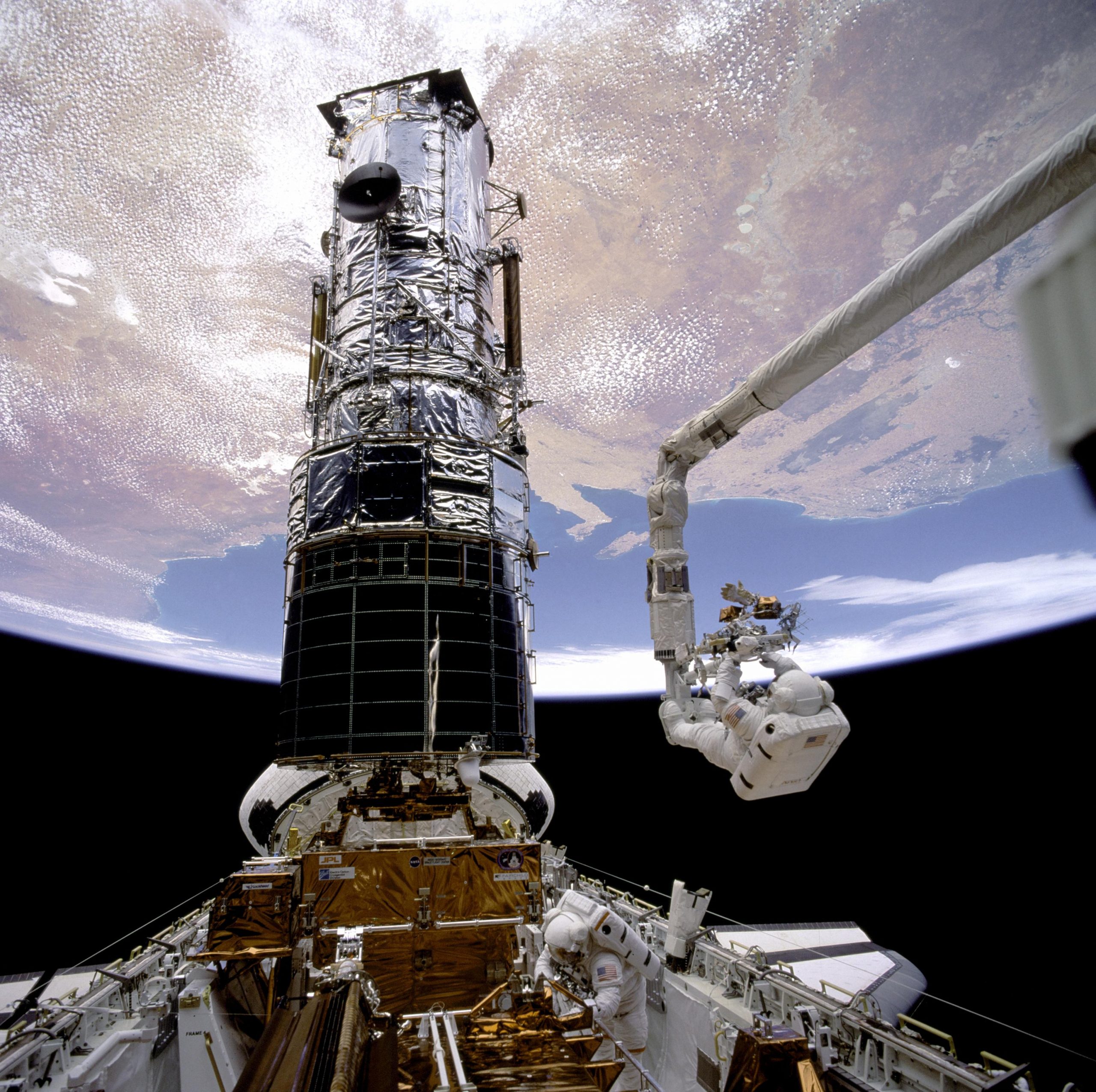

1990年4月、ハッブル宇宙望遠鏡が打ち上げられる。地球の大気の制約を受けない宇宙の天文台として世界の期待を集めたHSTだが、打ち上げ後まもなく主鏡に不具合が見つかり、撮影した画像はピンぼけしてしまうことが判明した。また宇宙空間の温度差が太陽電池パネルの軸を伝わって衛星を振動させる「ジッタ」現象も発生した。
HSTは開発時から機器の交換や修理を織り込んでおり、そのための器具も用意されていた。しかし見つかった不具合は予測されたものではなく、急遽3年かけて交換用のカメラと太陽電池パネルが用意される。そして1993年12月、スペースシャトル・エンデバー号による最初のサービスミッション(FSM)が実施され、35時間28分のEVAによる大規模な軌道上修理に成功した。
1997年には第2回サービスミッション(SM2)が実施され、近赤外分光カメラを追加して新たな観測が可能になった。さらに、2回にわたる第3回修理ミッションでは、電源ユニットや観測設備が交換された。コロンビア号の事故によってスペースシャトル計画が中断していた期間にロボット(無人)サービスユニットの開発も計画されたが、スペースシャトルの再開によって再度の有人による修理を実施。2009年のSM4では、ワイドフィールドカメラ3の取り付けに加え、初めて軌道上で回路を交換する作業を成功させるなど、全4回の修理ミッションはすべて成功している。打ち上げから30年、HSTは現在も観測を続けており、年数の経過した衛星を修理改修することで長く活躍させられるという実例となった。
軌道上施設存続にはサービス技術が必須
HSTのサービスミッションが続いていた1990年代から2000年代初頭には、軌道上サービスに必要な要素技術が次々と開発されていた。2008年のNASAの予算書には、軌道上サービスの技術を確立すべき理由として、「地球軌道またはラグランジュ点に観測施設を構築する際に有人または無人のサービス技術を必要とするため」と書かれている。HSTだけでなく、ISSも定期的な改修を前提とした宇宙機だ。日本の補給機HTV(こうのとり)もたびたび電源ユニットなどのISS補修部品を運んでいるように、いずれは消耗する部品を交換する、新たな機能を追加するといった作業が常に行なわれている。地上の建築物同様、宇宙機も作りっぱなしではなくメンテナンス、機能強化が必須であり、軌道上サービスの技術はそのために必要になる。
日本も先駆けた軌道上サービスの要素技術
GSFCのレポートに挙げられている軌道上サービスのエポックな技術のひとつは、実は日本が実証したものだ。JAXAの前身組織のNASDAが1997年11月に打ち上げた技術試験衛星VII型「きく7号(ETS-VII)」は、軌道上サービスに欠かせない自律ランデブー・ドッキングを実証した先進的な衛星である。きく7号はチェイサ衛星「ひこぼし」とターゲット衛星「おりひめ」の2機から構成される。2機は打ち上げ後に分離し、「ひこぼし」がGPS位置情報を元に「おりひめ」に接近、自律的に位置や姿勢を制御しながら、秒速1センチメートルの低速で「おりひめ」をロボットアームで把持することに成功した。カメラを使った精密な航法誘導、衝撃の少ない低速でのドッキングなど、軌道上サービスの実現の基礎を築いた。


米国も1990年代後半から軌道上サービスの実証機を次々と計画している。1999年にDARPAが打ち上げた技術実証衛星「MUBLCOM」をターゲットに、2005年にNASAが打ち上げた「自律型ランデブー技術実証衛星(DART)」がランデブー・ドッキングを試みた。ターゲット衛星とチェイサ衛星が別々に打ち上げられ、時間をおいてランデブーするという高度な計画だったが、ランデブーに成功したもののセンサー異常などの問題からDART衛星がターゲットと衝突し退避するという結果となった。
2007年には、DARPAによる新たな実証機「自律型宇宙輸送ロボット運用衛星(ASTRO)」と「次世代サービス可能型衛星(NEXTSat)」が打ち上げられた。NEXTSatはASTROによって修理されることを前提とした設計で、バッテリー取り付けとフライトコンピュータ交換の実証に成功している。以後はRRMなどISSをテストベッドにした実証が行われ、NASAは寿命の尽きた地球観測衛星「ランドサット7号」に推進剤を補給する「OSAM-1」ミッションが2023年ごろの打ち上げを目指して進められている。
軌道上サービスを実現する意味
時間のかかる衛星実証を重ねても軌道上サービスを成立させる意味とは何だろうか。GSFCのレポートによれば、静止通信放送、測位衛星など実用衛星にとっては、衛星の寿命を伸ばして比較的小さなコストで継続的なリターンを得られることがメリットだとしている。これを実現したのが前回の記事で紹介したノースロップ・グラマンのMEV-1だ。この分野では、推進剤補給と軌道調整がもっとも役立つ技術とされている。
HSTのような科学衛星や衛星技術にとってのメリットは、コンポーネント更新による科学的能力の増強だ。科学分野で活躍する大型、多機能な衛星は開発に5~10年と時間がかかり、打ち上げたときには新たな観測要求が出現していることもある。修理、改修、軌道上組み立てといった軌道上サービスが実現できれば、HSTにカメラを追加したのと同様に、新たな観測能力を補うことができる。
そしてもうひとつ、軌道上サービスには地球周辺の軌道の安全を守るという意味がある。低起動をクリーンに保ち、静止軌道という限られたリソースを世界全体で利用し続けるには、スペースデブリ除去といった技術が必要になる。
スペースデブリ除去と並行して浮上してきたのが、軌道上サービスの技術をASAT(衛星破壊)の技術と区別するという観点だ。軌道上でロボット衛星が他の人工衛星に接近し補修を行う技術は、反対に使えば他者の衛星の機能を損傷する破壊工作にもなる。ミサイルで衛星を破壊するような荒っぽいASAT技術は軌道上の環境を危険にし、破壊を行う側にとってもデメリットが大きいが、衛星の機能を損なうだけならばリスクは小さい。こうした技術の悪用を防ぐ対策はまだはっきりとはないものの、宇宙法の関係者らによる論点整理などが始まっており、スペースデブリ対策と共にルール作りが進められつつある。
ハッブル宇宙望遠鏡の大改修と多くのロボット衛星実証によって進んできた軌道上サービスの技術。商用衛星での利用も可能になった2020年以降は、これまで育てきた技術の恩恵を受けられる時期になるだろう。
◆◆◆
この記事は、軌道上サービスに関するシリーズの2回目です。第1回の記事はこちら。
- 人気の記事ランキング
-
- Anthropic can now track the bizarre inner workings of a large language model 大規模言語モデルは内部で 何をやっているのか? 覗いて分かった奇妙な回路
- Promotion MITTR Emerging Technology Nite #32 Plus 中国AIをテーマに、MITTR「生成AI革命4」開催のご案内
- AI companions are the final stage of digital addiction, and lawmakers are taking aim SNS超える中毒性、「AIコンパニオン」に安全対策求める声
- This Texas chemical plant could get its own nuclear reactors 化学工場に小型原子炉、ダウ・ケミカルらが初の敷地内設置を申請
- Tariffs are bad news for batteries トランプ関税で米電池産業に大打撃、主要部品の大半は中国製
- 秋山文野 [Ayano Akiyama]日本版 寄稿者
- フリーランスライター/翻訳者。1990年代からパソコン雑誌の編集・ライターを経て宇宙開発中心のフリーランスライターへ。ロケット/人工衛星プロジェクトから宇宙探査、宇宙政策、宇宙ビジネス、NewSpace事情、宇宙開発史まで。著書に電子書籍『「はやぶさ」7年60億kmのミッション完全解説』、訳書に『ロケットガールの誕生 コンピューターになった女性たち』ほか。