人工知能(AI)
無料会員限定
A robot puppet can learn to walk if it’s hooked up to human legs
人の動きを真似る二足歩行ロボ、「学ぶ」への一歩
人・機械インターフェイス(HMI)を使って人間の足の動きを模倣するロボット・システムをMITとイリノイ大学の研究チームが開発した。ロボット工学の課題である自律型ロボットへの応用が期待される。 by Charlotte Jee2020.01.21
人間は階段を見たことがなくても、それが何なのか、どうやって上ればいいのか理解できる。しかしロボットにとっては、それが乗り越えられない壁に思えてしまう。
私たちが難なく動き回っているところをロボットに模倣させることは、1つの解決策になる。これが、2019年10月30日付けのサイエンス・ロボティクス(Science Robotics)に掲載された、イリノイ大学とマサチューセッツ工科大学(MIT)の研究者による研究の前提となっている。
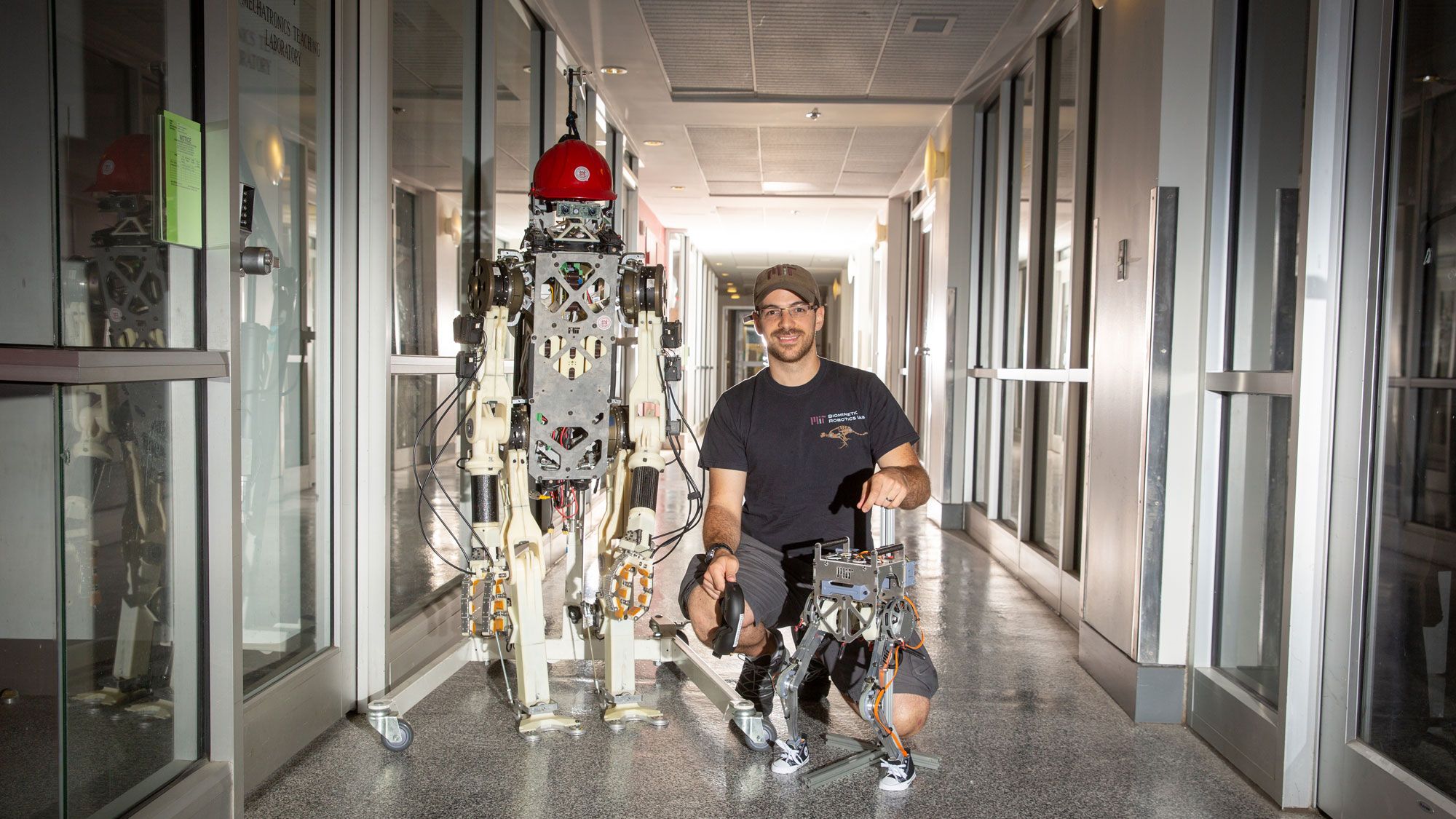
イリノイ大学とMITの研究者らは、オペレーターの動きをロボットにマッピングする、人・機械インターフェイス(HMI)を開発した。このHMIは、モーションセンサーを備えた板の上での、飛び跳ねる、歩く、ステップを踏むといったオペレーターの足の動きを読み取ることで機能する。また、このシステムでは、各種センサーが接続されたベストを着用することで、オペレーターの体の動きをトラッキングする。胴体と脚から得たデータは、MITが開発した二足歩行ロボット「ハーミーズ(Hermes)」の小型版にマッピングされ …
- 人気の記事ランキング
-
- This company claims a battery breakthrough. Now they need to prove it. すべてのパラメーターが矛盾——「出来すぎ」全固体電池は本物か?
- OpenAI’s “compromise” with the Pentagon is what Anthropic feared アンソロピック排除の裏で進んだオープンAIの軍事契約、その代償は
- AI is rewiring how the world’s best Go players think 「アルファ碁」から10年、 AIは囲碁から 創造性を奪ったのか
- How uncrewed narco subs could transform the Colombian drug trade 中には誰もいなかった—— コカイン密輸組織が作った 「自律潜水ドローン」の脅威